| Student: | Y. Li |
|---|---|
| Timeline: | September 2023 - 1 September 2027 |
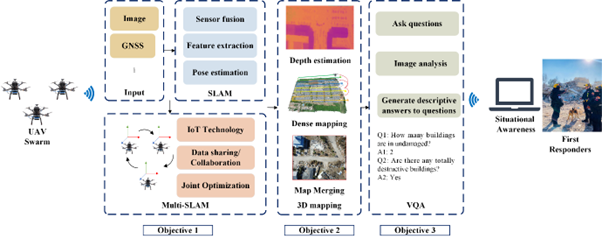
First responders (FRs) need to make rapid response efforts after emergency environments. It is a tough task that requires abundant professional knowledge and complex operations, particularly in urban post-earthquake scenarios, such as the recent earthquake in Morocco. To execute rescue operations promptly, it’s necessary to gain a comprehensive understanding of post-disaster terrain conditions, the location of individuals, and the extent of damages incurred. Nowadays, Unmanned Aerial Vehicles (UAVs) are increasingly being used to create situational awareness and support FRs in post-disaster rescue operations. UAVs offer several advantages over other types of robots, including lightweight design, compact size, high flexibility, and high spatial resolution. Due to the limited battery capacity of a single drone, it is often necessary to utilize multiple drones to cover larger areas effectively. These capabilities make multiple UAVs particularly well-suited for urban post-earthquake scenarios, as they can serve as effective tools for field surveys. To provide FRs with valid information about the on-site situations, including determining the real-time location of the multiple UAVs, creating 3D maps, and answering FRs’ questions regarding the post-disaster environment, these challenges need to be addressed with the help of simultaneous localization and mapping (SLAM), three-dimensional (3D) reconstruction, and visual question answering (VQA). Based on this, my PhD research will focus on three topics: 1) Multi-UAV SLAM, 2) 3D emergency mapping, and 3) VQA to support the rescue tasks.
The project aims to create an effective tool to establish situational awareness in emergency environments and facilitate the implementation of post-disaster rescue efforts. The expected outcome is to develop UAV swarm-based multi-SLAM and VQA algorithms for emergency environments for constructing 3D maps and delivering descriptive answers to FRs.
Meet the team



