| Student: | B.L.U. Udugama Vithanage MSc |
|---|---|
| Timeline: | August 2022 - 1 August 2026 |
UAVs represent one of the most relevant emerging technologies in the remote sensing domain of the last two decades, becoming a valid alternative to traditional acquisition techniques in a wide range of applications. In common practice, UAV flights are pre-planned before starting the mission, while data processing is performed offline after the acquisition. However, these methods limit UAVs' applicability in dynamic and complex contexts. Examples of UAVs able to fly autonomously in an interest area, acquire complete data, understand the scene, and take autonomous decisions are still in their very early stage. However, these solutions would promise to open new opportunities for more advanced applications. Hence this research will try to address the autonomous operation of UAVs in an unknown environment with spatial understanding in real time.
Implementing Active SLAM in real-time on UAVs is the key focus of this research. So apart from exploring an unknown environment, UAV should be able to build a map including semantic data in real-time using edge computing techniques with the possibility to fine-tune the map offline. It is planned to be tackled on three main fronts,
- Autonomous Exploration
- SLAM with semantic information
- Real-time implementation on an edge computing platform
This research mainly focuses on Deep Reinforcement Learning (DRL) methods for autonomous robotic exploration. It discusses the design of the state, action, and reward spaces and the problems of partial observability, generalization, and real-time implementation. Along with the exploration agent, SLAM with deep learning-based algorithms will be incorporated with semantic understanding to extract scene information to make human-like decisions. Moreover, the map of the explored environment is represented by 3D scene graphs. The SLAM algorithm will be developed in a way that will collect and store raw data to fine-tune the map offline for higher levels of accuracy and resolution.
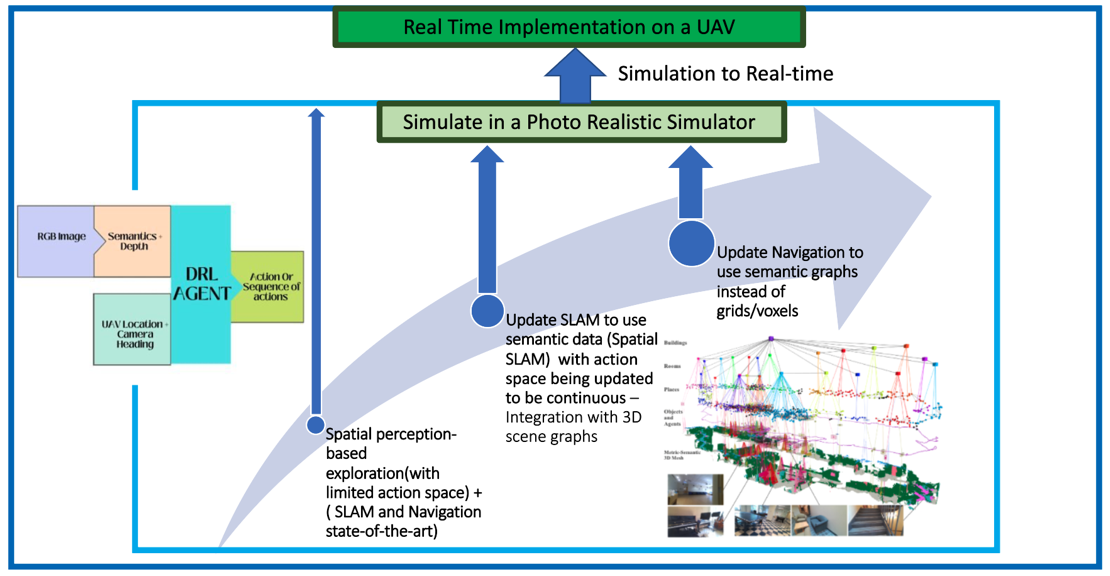
Figure - Proposed approach to resolve the research problem.
Meet the team



